Po nesplněných představách s přesností a stabilitou krásného a malého
leteckého gyrokompasu jsme se museli vrátit vývojově o rok zpět. Druhé
místo v loňské soutěži sice bylo krásné, ale toto umístění bylo jen díky
tomu, že se tento rok nějak nedařilo nikomu. Naše nejdelší ujetá vzdálenost
byla pouhých asi 90m z dráhy dlouhé celkem 314m. Celkové výsledky byly
možná ovlivněné i špatným počasím či erupcemi na slunci, kterého jsme si
ale v den závodu moc neužili… Nebylo pochyb o tom, že co je malé nemusí
být vždy nejlepší. I přes rozsáhlé změny, kterými robot prošel v loňském
roce se vše musí vrátit zpět. A tak se také stalo. Dostal lepší lasery
na zaměřování při startu a hlavní změnou byla v pořadí již třetí výměna
motorů. Stěračové motory byly dostatečně silné pro pohyb na hladkém povrchu,
kterým je cesta v parku, ale pro otáčení v trávě jsou slabé. Opět čirou
náhodou se podařilo sehnat motory, které naprosto splnily naše požadavky.
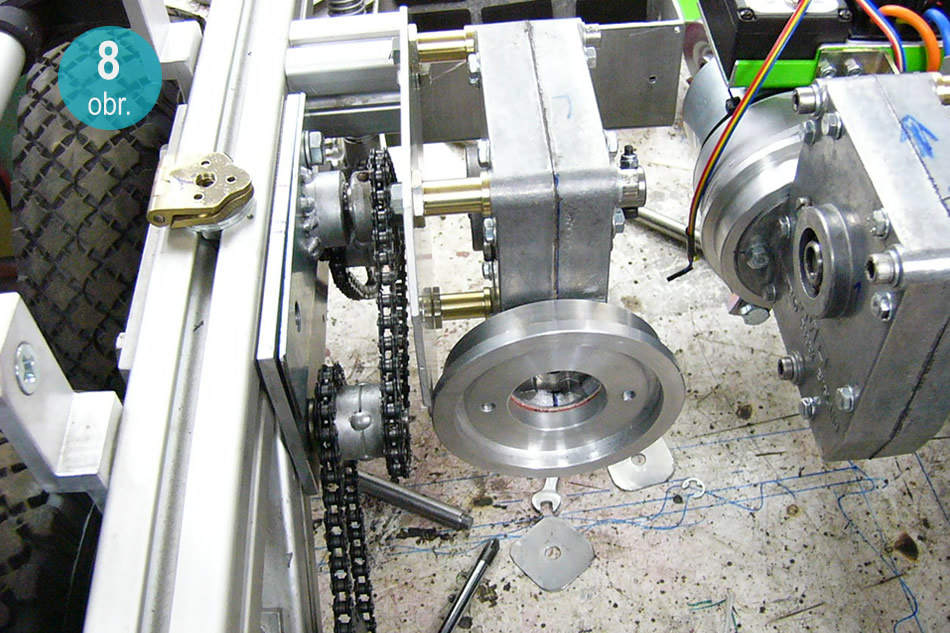
Malé a neuvěřitelně silné. Akorát jejich regulace je problém. Jde o tří
– fázové motory na 12V,
(obr. 8) které se používají v osobních autech jako posilovač
řízení. Svým silným vinutím s téměř nulovým odporem připomínají spíše startér,
ale modelářský regulátor s nimi nakonec začal fungovat skvěle. Bylo nutné
sice doplnit snímače polohy rotoru, který regulátor požaduje, ale vyplatilo
se. Vysoká síla, kterou dokáží vyvinout byla odměnou za úsilí, které to
stálo. Ale jako vždy, nic není tak jednoduché, jak se zpočátku zdá. Objevil
se tu další problém. Velká síla je super, ale když má robot zatočit, tak
jede stále skoro rovně. Při hmotnosti cca 50Kg se totiž začíná motor, který
má pomalejší otáčky při zatáčení roztáčet místo toho, aby si své otáčky
držel. A to i přes to, že je zde šneková převodovka. Mechanické brzdění
se do robota nevejde a tak se začalo zkoušet co vydrží regulátory. Jedním
slovem „hodně“…. Muselo být doplněno další snímání otáček motorů a tento
signál byl porovnáván s tím požadovaným. O vyhodnocení se starají programy
procesorů PICAXE,
(obr. 9) kterých je v robotu asi kolem 20 kusů. Pokud
se motor začne roztáčet víc, než je požadováno, připojí se paralelně k
vinutí „ brzdné „ rezistory s odporem několika málo ohmů a motor který
se začne chovat jako dynamo zpomalý. Na stejném principu je brzděný i v
případě, kdy má jeden motor stát a druhý se točit – to je při otáčení na
místě. Tady je ale už vinutí zkratované „ natvrdo „ . Ale vraťme se k vlastní
soutěži RORO 2013. Výměna motorů sebou přinesla i mírné zvýšení rychlosti,
což bylo vítáno, neboť při dosažení stejných ujetých vzdáleností vítězí
ten rychlejší. Robot projel všechny tři kola výborně a ještě s nejlepším
časem.