RoboOrienteering 2013
Letošní změna motorů slibovala i podstatně lepší zatáčení v trávě, na
které se pořádá tento závod. Na rozdíl od předešlé RORO se robot pohybuje
po parku systémem „ cesta – necesta“ a jeho úkolem je najít oranžové plastové
kužely, jejichž GPS souřadnice dostanou soutěžící pár minut před startem.
V cestě za vytouženým kuželem se musí poprat s překážkami jako jsou stromy
a lavičky. Pro nalezení překážek mu slouží vpředu tři ultrazvukové sonary
– obdoba parkovacích senzorů v autě, pomocí kterých měří vzdálenost od
překážek a propočítává kudy se překážce vyhnout. Tím se ale vždy odchýlí
od požadovaného směru ke kuželu a tak musí znovu přepočítat podle GPS přijímače
nový směr. Problém nastává pod korunami velkých stromů, kterých je v parku
víc než dost, neboť GPS přijímač potřebuje pro správné určení své polohy
dobrý výhled na oblohu. A tak si chvílemi robot dělá co chce až do chvíle,
než se dostane na místo s lepším výhledem. Pak si určí svou polohu a upraví
správně směr k cíli. Tak se nakonec dostane do blízkosti hledaného kuželu.
Přesnost záleží na vyhodnocení GPS a pohybuje se kolem cca 2 – 5 m. Tady
přichází na řadu kamera. Robot se začne pomalu otáčet na místě a pomocí
kamery se snaží najít červený kužel. Nebo spíše cokoli červeného. (obr. 16) Aby se eliminovaly falešné předměty jako třeba červené střechy, zároveň
si měří paprskem laserového dálkoměru vzdálenost od překážky – kuželu.
Pokud se mu podaří vidět červenou barvu a zároveň překážku blíže než 4m,
považuje to za kužel. Pak přichází na řadu pomalý pohyb směrem ke kuželu,
kde se snaží udržet směr tak, aby kužel měl uprostřed zorného pole kamery.
O to se stará program CamTracking, který přes PC a program psaný v C# počítá
požadovaný směr. Po nárazu do kuželu se robot zastaví, couvne a zvolí si
souřadnice dalšího kuželu. V předchozím roce se ukázal nedostatek v podobě
příliš tvrdého nárazníku, který potřeboval pro vyhodnocení nárazu do kuželu.
Kužel bylo nutno vždy přidržet, aby ho nepřevrátil. Byl tedy vyměněn za
„ světelnou závoru„ kdy je náraz vyhodnocený jako přerušení světelného
paprsku. Toto se osvědčilo. Až na menší nedostatky jakými byly špatné rozpoznání
kuželu kamerou v případě, že kužel je ve stínu a kolem svítí slunce a naopak,
fungovalo vše skvěle a robot zaslouženě zvítězil.
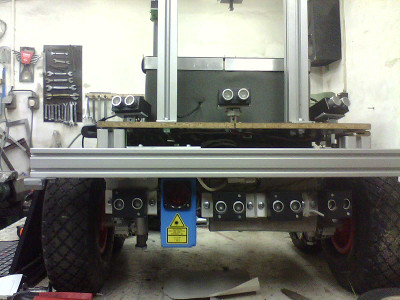
Obrázek 16
