Po úspěšném absolvování naší první robotické soutěže jsme začali přemýšlet,
co by tenhle náš drobeček ještě mohl zvládnout. Závěr byl rychlý. Nic.
Na ostatní soutěže, založené na jiné strategii prostě nemá šanci. Nejzajímavější
pro nás byla soutěž RoboOrienteering, ale s touhle technikou – určitě ne.
Vzhledem k naší neznalosti systému GPS a zpracování obrazu z kamery jsme
rychle skončili zase u gyroskopu a odometrie. Se stávajícím systémem to
ale nešlo, neboť ten umí měřit úhly jen rozmezí cca 60°. Bylo zapotřebí
vyměnit gyroskop za jiný. Opět spíše náhodou se podařilo zakoupit starý
vojenský, asi letecký gyroskop na Aukru. Ten umí měřit v rozsahu celých
360°. Optimální přístroj pro navigaci v terénu. Bylo rozhodnuto. Vyměníme
gyro, doplníme měřicí kolečko na odměřování ujeté vzdálenosti a hurá na
další soutěž. Jak se později ukázalo, tak jednoduché to zase nebylo. Začalo
se s výměnou gyra, aby se stihla alespoň soutěž RORO. Nový přírůstek se
naprosto liší od původního tankového.
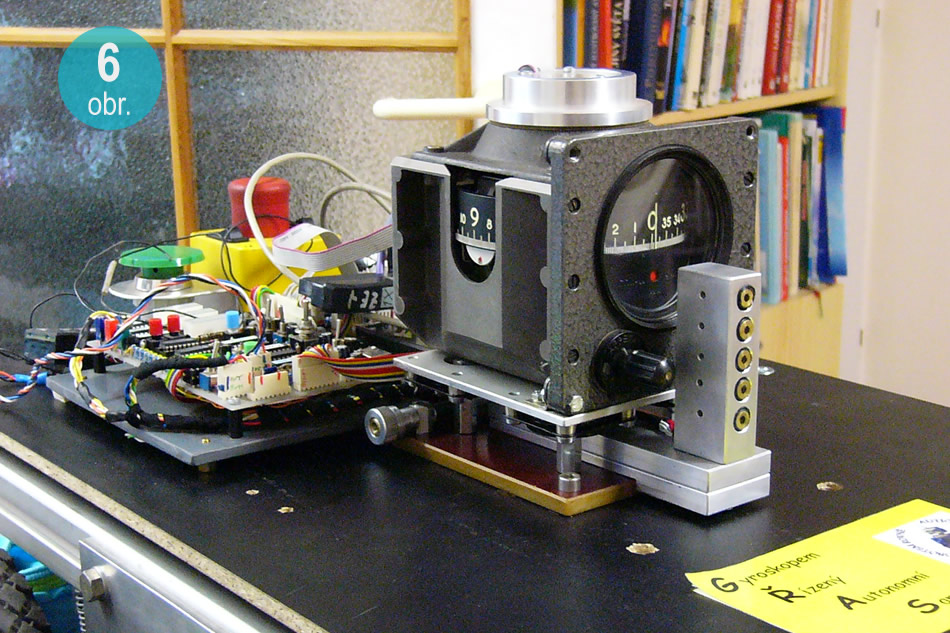
(obr. 6) Z celého systému vedou jen tři dráty – vinutí
motoru. Všechny ostatní kompenzační cívky jsou doslova s vojenskou precizností
uloženy uvnitř takřka nedobytné kovové konstrukce. Roztočit ho nebyl žádný
problém – stačilo ho napojit místo původního a hle – ono to vše funguje.
Koukali jsme na něj jako na zázrak, neboť všechny ty kompenzace, které
mi trvaly alespoň částečně zprovoznit několik měsíců má v sobě. A naprosto
funkční. Pokud se s ním moc neklepe, tak dokáže „ stát „ na místě bez hnutí
i celé hodiny a to, že se Země otáčí, je mu fuk. Optimální navigace na
RORO. Bylo třeba dodělat jen elektronické snímání úhlu natočení, mírně
přizpůsobit řídící program motorů a mohl vyrazit na soutěž do Písku. Po
zkušenosti z loňského kola byl opět zvolen magnetický snímač a magnet připevněný
na osu gyra. Vzhledem ke zcela odlišnému výstupu ze snímače nebylo z původní
elektroniky použito téměř nic a vznikla nová deska s několika procesory
Picaxe. Už od počátku téhle přestavby bylo počítáno i s přidáním odměřování
ujeté vzdálenosti a struktura byla navržena jako otevřený systém, do kterého
se budou postupně doplňovat další komponenty jako např. sonary pro měření
vzdálenosti od překážek. Přidalo se odměřovací kolo umístěné uprostřed
podvozku, aby ujetá vzdálenost byla ovlivněna otáčením co nejméně a začaly
přípravy na Písek. Opět nespočet zkušebních jízd na dlouhé chodbě naší
školy, kde se dá trénovat i za nepříznivého jarního počasí. Vynaložená
práce přinesla své ovoce. Výsledky byly vynikající. Alespoň jsme se to
v tuhle chvíli domnívali. První úkol byl splněn – na Písek jsme připraveni.
Můžeme začít uvažovat o soutěži RoboOrienteering. Dali jsme dohromady program
pro výpočet vzdáleností a azimutů jednotlivých bodů vypočtených ze zadaných
souřadnic GPS a naivně si myslely, že odometrie bude to pravé ořechové.
Mezi tím se udělalo venku počasí, které dovolovalo vyjet do terénu. Záhy
se ukázalo, že vše je jinak. Stabilní gyroskop si dělá na trávě co chce,
kolečko neměří tak, jak bylo od něho očekáváno a náš milý robot se šine
naprosto jinam, než by měl.
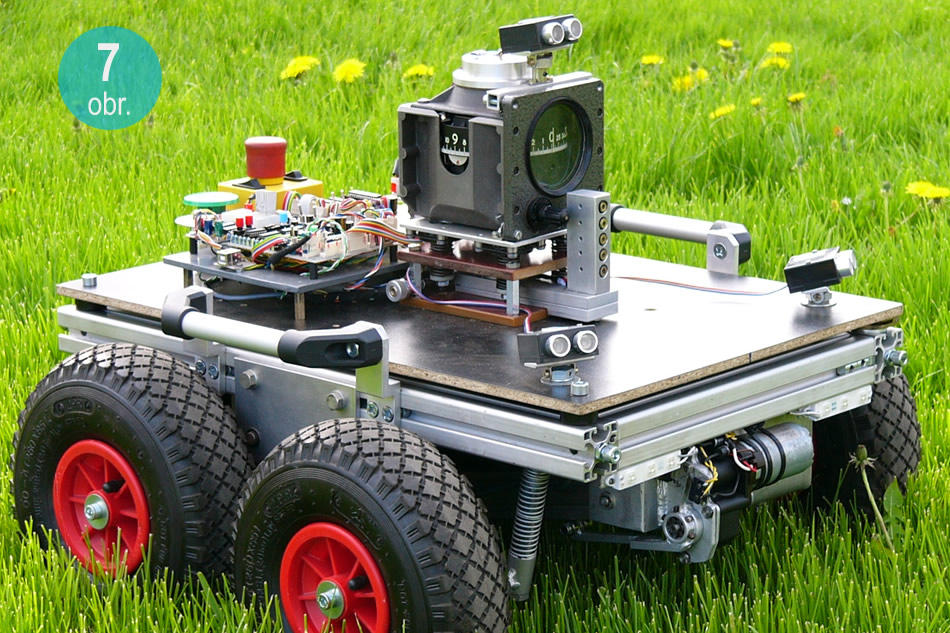
(obr. 7) Soutěž Robotem rovně je za dveřmi, a vrátit
zpět původní tankový gyroskop vhledem k provedeným úpravám už nebylo myslitelné.
Zbývalo tedy jediné. Odpružit nový gyroskop a tak alespoň částečně eliminovat
vibrace způsobené při jízdě po nerovném povrchu. Systémem uložení na pružiny
se to částečně podařilo a s nejistým pocitem jsme se vydali vstříc osudu
do Písku. Zaměřování laserem na odrazovku jsme ponechali a čekali na výsledek.
Ten nebyl vůbec špatný – druhé místo bylo velmi pěkné. I když popravdě
– očekával jsem, že dojedeme dál. To ale asi každý. O tom tahle soutěž
vlastně je. A závěr – vcelku stručný – ne každá změna je změna k lepšímu.
Pro příští sezónu vrátíme zpět velké a stabilní tankové gyro.