Pro naší již šestou účast v soutěži autonomních robotů jsme zas až tak
moc změn nepřinesli. Spíše naopak. Po loňském nezdaru v GPS jsme se vrátili
k již několikrát úspěšnému řízení pomocí velkého mechanického gyroskopu
z tanku. Kus poctivého železa, zpracovaného s vojenskou precizností a odolností
je pro tuto soutěž přímo optimální řešení. Nevadí mu nerovný povrch cesty,
kabely a potrubí pod povrchem chodníku ani velké stromy. Úspěch dojetí
do cíle záleží v podstatě jen na co nejpřesnějším nastavení na startovní
čáře. K tomu se používá již několikrát osvědčený laser připevněný na robotu
a přesně nastavený vůči gyroskopu a lať, na které jsou připevněny červené
odrazovky. Ta se umístí přesně v ose cesty asi 20 m daleko od robota směrem
k cíli a celý robot se ručně natočí tak, aby bylo vidět laserové světlo
odražené od latě. Tím je nastaven robot v ose chodníku, a pokud nedojde
ke kolizi s diváky nebo účastníky právě probíhajících slavností, je pravděpodobné,
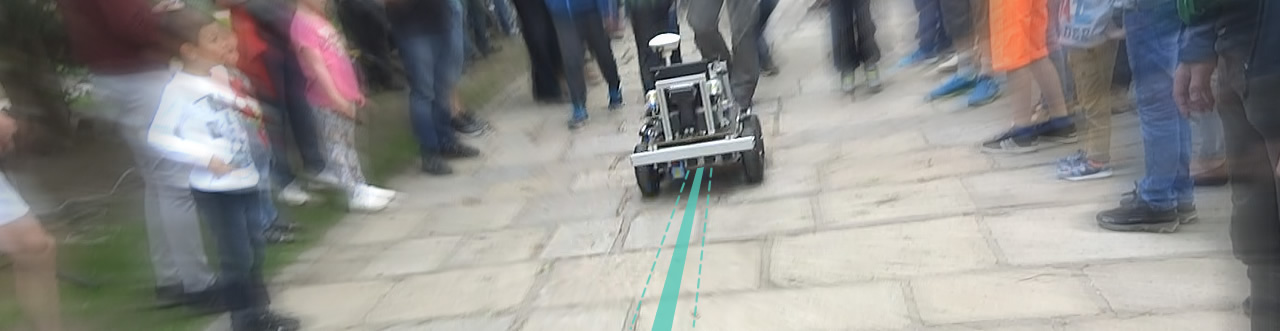
že do cíle dojede. Důkazem toho je i letošní výsledek – ze čtyř pokusů
byly všechny úspěšné a tím nám opět zajistily první místo.
(obr. 13) Pro příští rok ale plánujeme opět zkusit štěstí
s GPS. A to i přes to, že se tento systém neosvědčil. Ale postavit opět
na start robota s perfektně doladěným gyroskopem by bylo příliž jednoduché.