Letošní ročník soutěže RORO se pro nás nesl už jen v rovině malých změn.
Dá se říci spíše kosmetických. Po loňském již druhém vítězství se může
zdát, že není co vylepšovat. Ale přesto se něco našlo. Změnou v programu
se podařilo vymačkat z motorů trochu vyšší otáčky a tím i větší rychlost.
Konkurence nám šlape na paty a udržet si svojí pozici na výsluní je stále
těžší. V loňském závodě nám byla položena otázka, jak je možné, že když
je robot řízen gyroskopem nejede celou cestu naprosto rovně. Zhruba ve
dvou třetinách se totiž ze středu cesty vychýlil k levému okraji a po pár
desítkách metrů se zase vrátil zpět. Vypadalo to jako by zde byl učiněn
zásah ze strany obsluhy, což je nepřípustné. Robot musí dojet do cíle naprosto
sám. Nedokázal jsem na tuhle otázku hned odpovědět. Ale žádný zásah skutečně
prováděn nebyl. Několikrát jsem prošel celou trať a nakonec se příčina
našla. V místech, kde robot náhle začne měnit směr se totiž cesta mírně
svažuje do leva a po chvíli se zase vyrovná. Gyroskop, který si směr perfektně
drží na rovině na to zareaguje tak, že se boční náklon promítne do směru,
který má udržovat. Je to způsobeno špatným vyvážením celého systému gyroskopu
a nepřesnou kompenzací tohoto náklonu. Když se cesta opět vyrovná, i gyroskop
se vrátí do původní polohy.
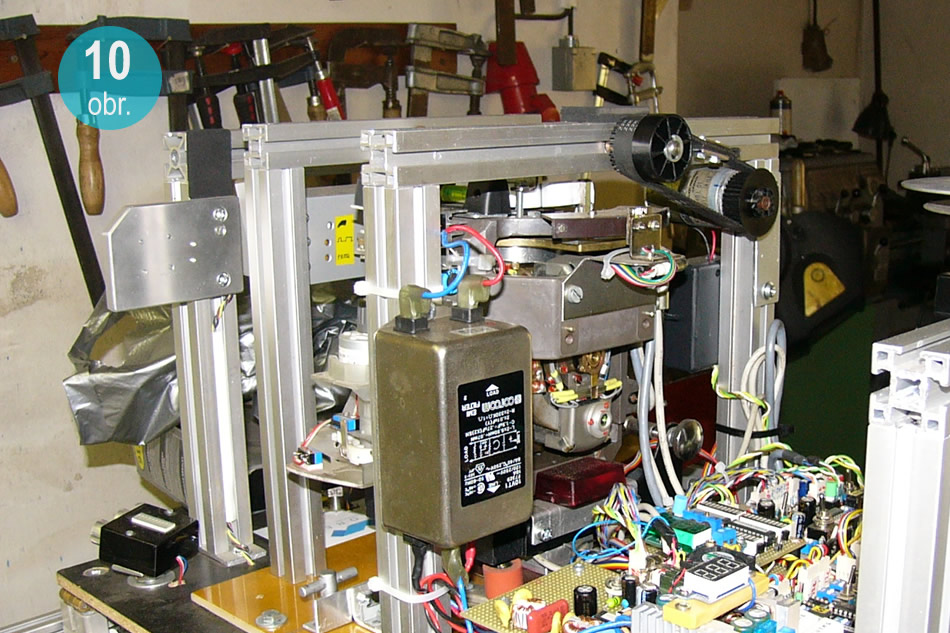
(obr. 10) Určitě by se to dalo řešit změnou parametrů
kompenzačních cívek, ale je to tak choulostivá záležitost, že k tomu nikdo
nemá odvahu. Přistoupilo se tady k tomu, že celý asi 5 kg vážící gyroskop
byl „ pověšen „ na houpačku tak, aby si při bočním náklonu stále jako kyvadlo
udržel svojí vodorovnou polohu. Nastal tu ale jiný problém – na nerovném
povrchu se hezky rozhoupal. A tak další komplikace. Nakonec se to vyřešilo
pomocí snímače polohy, určujícího vodorovnou rovinu a převodového motoru,
který celý systém udržuje v rovině. Sice se celý gyroskop opticky tak trochu
cuká sem – tam, ale rovinu si drží. I při závodech se ukázalo, že systém
vyrovnávání funguje a robot opět dosáhl na stupně vítězů.