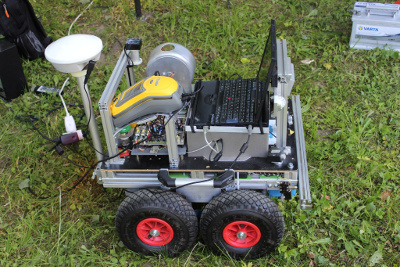
Po třech vítězstvích a jednom druhém místě jsme usoudili, že je čas na změnu. Systém s gyroskopem je již odladěn do té úrovně, že nedojet do cíle by byla spíše náhoda. A proto padlo rozhodnutí pro radikální změnu. Tou byla výměna Gyroskopu za systém používaný při Roboorienteengu. To znamená PC, GPS a tříosá inercionální jednotka použitá jako kompas. První problém je, že dráha, na které probíhá závod je dokonale schovaná pod velkými stromy a tudíž GPS signál téměř nepoužitý. Druhý problém jsou nejrůznější kabely a potrubí pod cestou, které dokonale matou kompas. Podařilo se nám zakoupit starší geodeticko GPS EXPLORER 2008 od firmy TRIMBLE (obr. 11) ( název GPS a našeho robota je opravdu čistě náhodný ). Nebyla nejlevnější, ale výsledky kterých dosahuje předčily všechny naše očekávání. Jedná se o dvou frekvenční přijímač, tak že mimo frekvence L1, kterou přijímají běžné GPS zpracovává také L2. A to z ní dělá úplně něco jiného. Při dobrém výhledu na oblohu a přítomnosti satelitu SBAS – to je satelit umístěný nad rovníkem, který vysílá zpřesňující korekce, se dá dosáhnout přesnosti i v řádu desítek cm. To sice v Písku na soutěži nehrozí, ale i přes to se přesnost polohy pohybuje většinou okolo metru. A to by mohlo stačit.
Trimble, co by výrobce přesných GPS však nepožívá výstup ve formátu MNEA vět tak, jako ostatní. Možná pro to, že souřadnice v NMEA formátu mají o několik řádů nižší přesnost, možná z jiného důvodu, nic méně je to pro nás problém. Program pro navigaci máme postavený právě na formátu MNEA a data, která lezou z Trimbla se použít nedají. Nebo spíše z něj ven ani žádná použitelná data nelezou. Komunikuje přes protokol TSIP, což je oboustranná výměna dat a souřadnice se počítají až v dalším software, dodávaným touto firmou. Alespoň tak jsme to pochopily. Pokud jsem teď napsal něco špatně, tak se firmě Trimble omlouvám…. Díky ochotě zastoupení firmy pro Českou republiku jsme sehnaly perfektně zpracované připravené programy, které řešily přesně to, co jsme potřebovali. Začlenit data z GPS do vlastního programu. GPS funguje, kompas také, a po malé úpravě navigačního programu se zdá být vše funkční. Pár zkušebních jízd na delší vzdálenost prokázalo schopnost se udržet na silnici celkem bez problémů. Sice kolem zkušební dráhy bylo jen pár stromů a v parku není skoro vidět na oblohu, ale za pokus to stojí. (obr. 12) S nejistým pocitem jsme postavili robota na start. K našemu údivu se však nešinul směrem k cíli, ale kamsi vlevo. Po ujetí pár metrů vždy skončil na trávě mimo cesty. Nebylo nám jasné, proč taková změna, když doma vše fungovalo perfektně. Zkoušeli jsme všechno možné, ale na nic špatného jsme nepřišli. Sice jsme předem počítali s tím, že neosadíme přední pozice, ale takovéhle fiasko jsme tedy nečekaly. Nakonec jsme skončili na 14. místě z 25 soutěžících.

Obrázek 11
Obrázek 12