Vzhledem ke covidovým omezením v roce 2023, se pro malou účast závody robotů nekonaly. Letošní ročník byl proto, alespoň z mého pohledu, plný očekávání, s čím se vytasí ostatní týmy.
Nakonec byl spíše ve znamení oprav a dolaďování robotů. Pavel z ND Team přijel tentokrát bez robota, neboť mu těsně před soutěží shořel driver motoru a v tak krátké době nebylo možno jej opravit.
Jedoboti, nováčci v téhle soutěži, přijeli karavanem o den dříve a přespávali v těsné blízkosti parku. Přivezli s sebou roboty dva. Jeden jim večer jezdil jak se od něj očekávalo, ale ráno bylo vše jinak. Nakonec se podařilo závady odstranit a posbíral si pár bodíků. Druhý se však vůbec přesvědčit nenechal.
Alešovi s AmBotem zlobilo pokládání míčků, tak jezdil raději bez nich. Pak se ale na jeho stroji vyskytla další závada v podobě vadného kontaktu v propojovacím kablíku. Ta se mu podařila opravit a tak mohl pokračovat i v třetím kole.
Druhému Alešovi s ARBotem se zpočátku také moc nedařilo. Robot se vydal směrem ku Praze odkud pochází, místo toho aby jel hledat kužely. Možná se nechal inspirovat ET mimozemšťanem, který chtěl také domů. Ale i on se nakonec nechal přesvědčit a ve třetím kole předvedl skvělou jízdu, při které zdolal všechny kontrolní kužely a ještě se vrátil zpět do cíle.
| TÝM | Body 1. kolo |
Body 2. kolo |
Body 1.+2. kolo |
Body 3. kolo |
Body celkem |
Celkové pořadí |
| RK Mar. Lázně | 780 | 780 | 1560 | 650 | 2210 | 1 |
| ARBot | 0 | 40 | 40 | 375 | 415 | 2 |
| Jedoboti | 100 | 60 | 160 | 70 | 230 | 3 |
| AmBot | 10 | 44 | 54 | 65 | 119 | 4 |
| Jedoboti II | 0 | 0 | 0 | 0 | 0 | 5 |
| ND Team | 0 | 0 | 0 | 0 | 0 | 5 |
Nejvíce opět zabodoval náš robot, který pokaždé navštívil všechny kužely a dvakrát i projel cílem.
Sice se během jízdy několikrát zasekl a přemýšlel má-li jet dál, ale po malé chvíli vždy pokračoval. Je pravda, že každý rok najezdí spoustu hodin po zahradě, kde se testuje a hledají se případné problémy. Tenhle problém se ale vyskytl jen párkrát a tak jsem to přisuzoval malé vzdálenosti mezi kužely, neboť prostor pro zkoušení mám omezený.
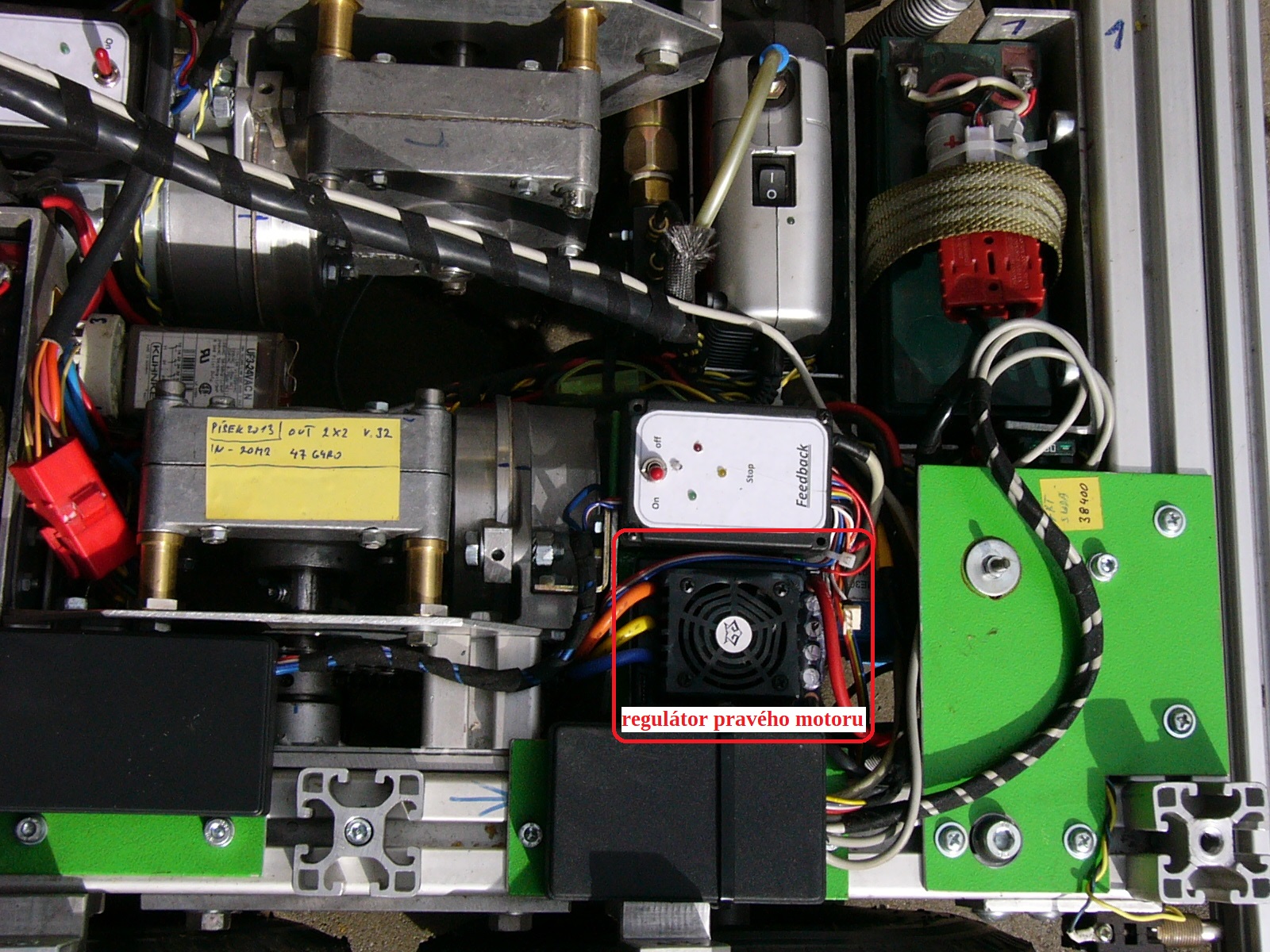
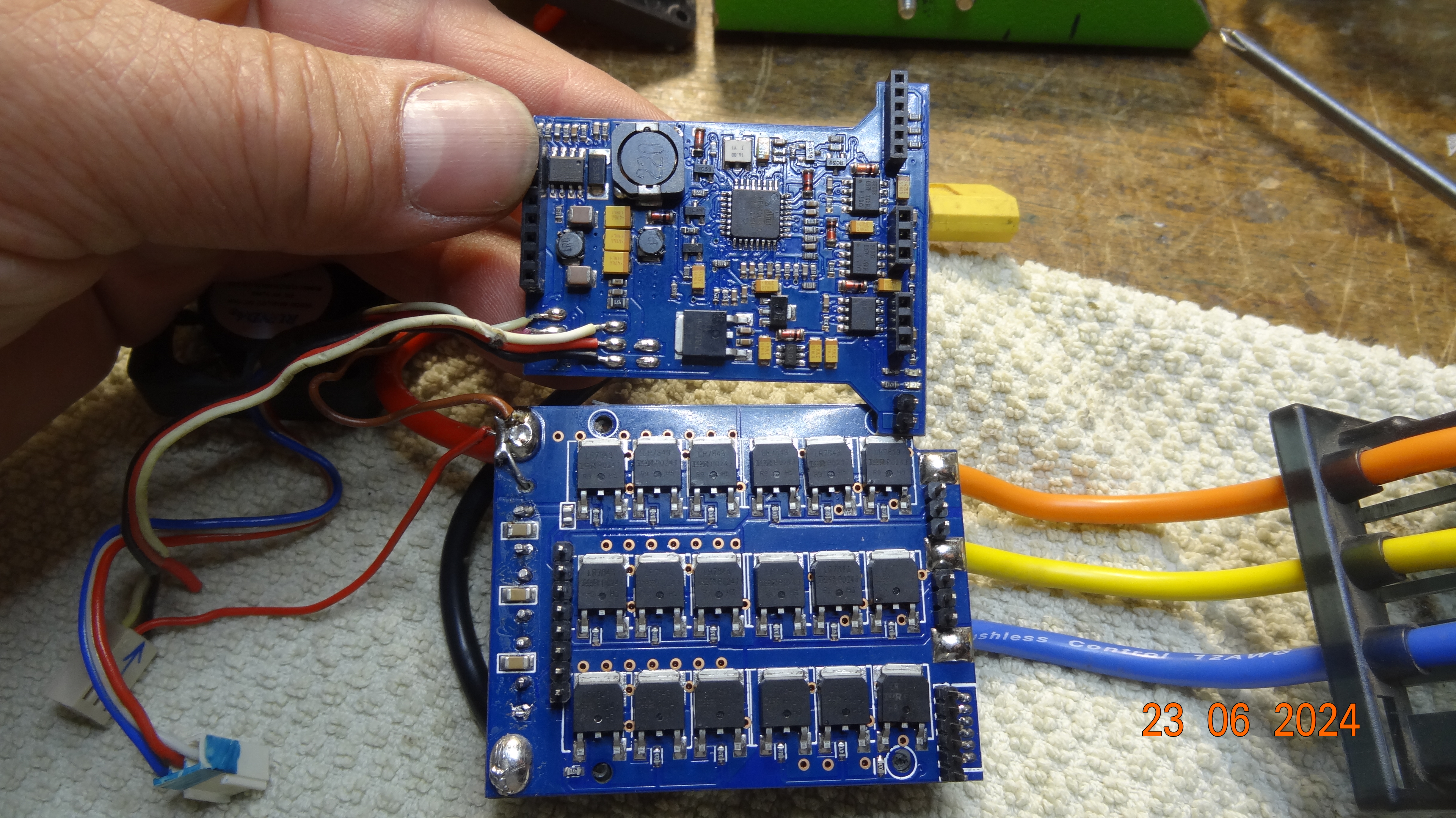
A tak jsem ho hned po závodech vyhnal na zkušební dráhu na zahradě s představou, že odhalím proč se to děje. Ještě než se stačil problém ukázat, byl tu nový. Přestal se točit jeden motor a z robota se začalo kouřit. Vypadalo to na výkonný stupeň regulátoru. Po vyoperování ven se nakonec ukázal jen nafouklý kondik, a tak byla oprava vcelku rychlá. Načasované to bylo věru přesně.
A zase jezdit a jezdit, dokud se program nezasekne. A skutečně se sekl. Bylo to po nárazu do kuželu. Už na závodech jsem si všiml, že když se program sekne, kompas posílá nesmyslně velké číslo do Pc a ten to neumí zpracovat. Aby se to neopakovalo, byl ošetřen program v PC – v případě nesmyslného azimutu si nechá pro výpočet ten poslední relevantní a stejně tak to udělá i procesor u kompasu.
Aby se pochopilo, jak tomu vlastně může dojít, je třeba se podívat na celé zapojení řízení robota. Na první pohled je to šíleně složité, tento systém vznikl jako modulární systém, který se stále vyvíjí. Z toho důvodu je zde nespočet malých procesorů PICAXE ( odhaduji asi kolem 40ks). Každý snímač nebo akční člen má svůj procesor. V něm běží většinou jednoduchý prográmek, který vyhodnocuje a transformuje data a ukládá je do vlastních registrů. Těmto procesorům je nadřazen jeden jako Master, který když potřebuje, tak si pro tato data do registru daného procesoru sáhne. Vybraná data pak přes sériovou linku pošle do PC. A tady nastává ten problém. Po nárazu do kuželu nebo případně do překážky Master procesor zastaví veškerou činnost, zastaví motory začne couvat, aby se překážce vyhnul. A právě toto přerušení vyvolané u Mastra pravděpodobně způsobí chybné, nebo neúplné poslání dat do PC. To vypočítá nový směr cesty z tohoto nesmyslného čísla a pošle ho zpět do procesoru, který řídí motory. Ten to neumí zpracovat a sekne se. No a o zábavu je postaráno. Tak snad se podařilo problém
Tak snad se podařilo problém najít a bude vše OK. To se uvidí příští rok.