Přišlo jaro a já začal přemýšlet, co na robotovi vylepšit pro letošní závody. Při těch minulých se ukázalo, že je asi špatně zkalibrovaný kompas. Robot i s přesnou GPS nedokázal většinou přijet přímo před kužel, ale zastavil kousek vedle. Někdy vpravo, jindy vlevo podle toho, ze které světové strany právě přijel. Kompas je 3d inercionální jednotka, ke které výrobce dodává i kalibrační program. Při kalibraci jsem ale dělal vždy tu chybu, že jsem otáčel podle pokynů programu jen kompasem a robot stál na místě. Sice kolem kompasu není v blízkosti nic magnetického, vše je hliník a nerez, ale i tak potom kompas reaguje na konstrukci robota. Výsledkem toho je, že při náklonu robota kompas začne vykazovat chybu i několik stupňů. A to zapříčiní špatnou navigaci k cíli. Vyrobil jsem proto „klec“ z hliníku a mosazi, do které se celý robot umístil a bylo možné otáčet celým robotem. No, nebyla to taková sranda, jak jsem předpokládal. Robot váží cca 50kg a tak to bylo dost zajímavé. Ale na třetí pokus se podařilo. Robot téměř nereagoval na náklon. Při kontrole natočení ve vodorovné rovině kompas však stále vykazoval chybu i několik stupňů. Vytvořil jsem proto tabulku odchylek od skutečného natočení a tyto rozdíly pak přenesl do programu komunikace s kompasem. Tím se vykompenzovala nelinearita a kompas ukazuje s přesností do cca 2° . Tohle zlepšení bylo znát hned při první zkušební jízdě. Robot zastavoval před kuželem podstatně přesněji.
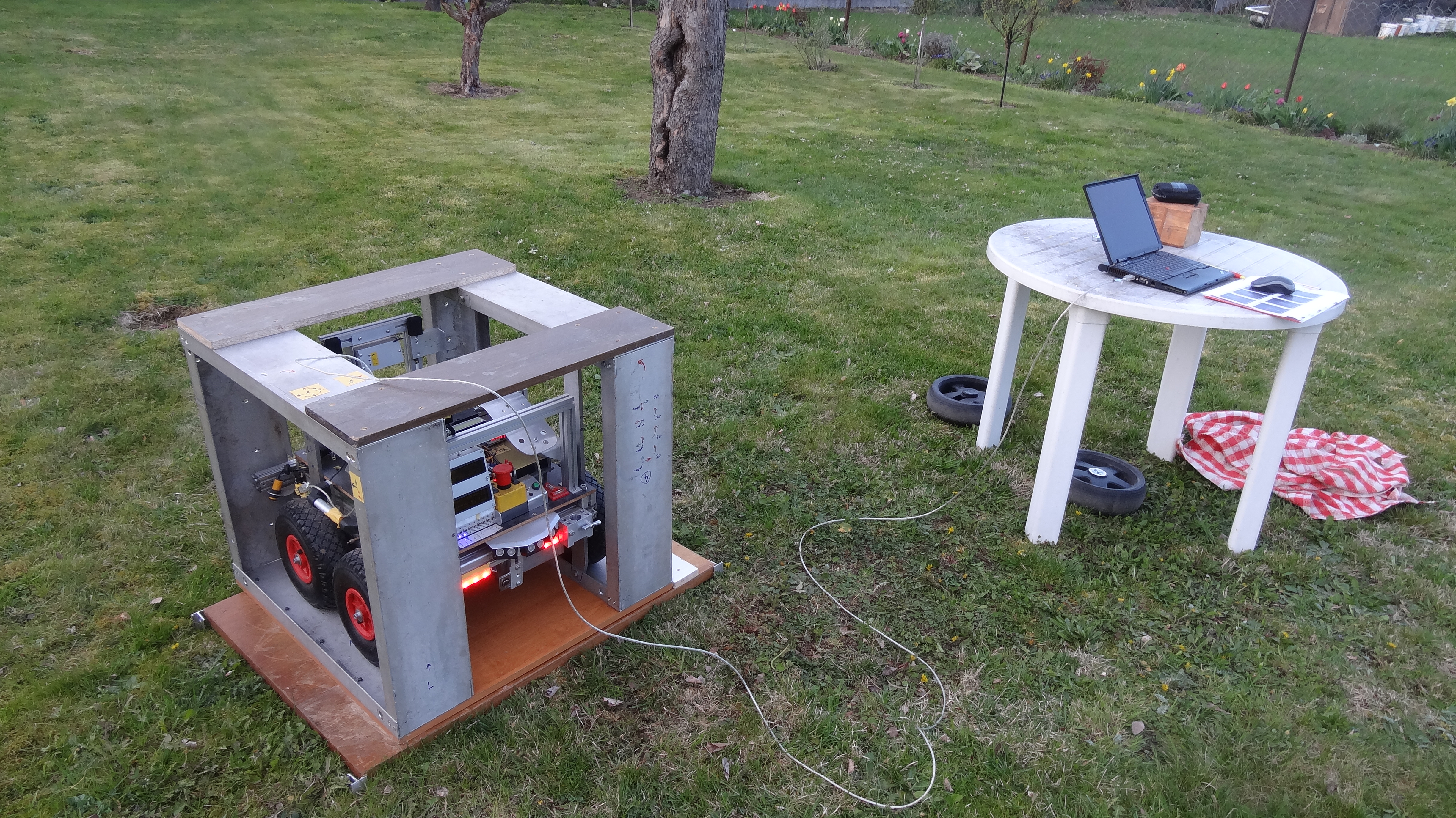
Další znatelné vylepšení byly nové algoritmy pro vyhýbání se překážkám. Pro vyhnutí se překážkám se požívají jen 3 kusy ultrazvukových sonarů. Sice byly pokusy s laserovým dálkoměrem, ale nakonec jsem zůstal u této jednoduší verze. Tak jako všechny snímače a výkoné ovladače i sonary mají pro výpočet vlastní procesor. Změna se proto odehrává pouze v tomto procesoru. Byl to tak trochu pokus – omyl, ale po pár dnech testování jsem dospěl k verzi, která se zdá být použitelná. Testování probíhalo v reálných podmínkách doma na dvoře ( viz foto a video ). Nakonec byly přidány ještě zadní sonary. Sice během jízdy robot necouvá, maximálně se otáčí na místě, ale pokud by neviděl překážku a narazil by do ní, pak couvat musí. To se stane i při nárazu do kuželu. A jelikož kolem kuželu nemusí být velký volný prostor, můžou se mu senzory hodit. V tomto případě se ale nevyhýbá, ale pouze zastaví kousek od překážky, otočí se směrem do volného prostoru a pokračuje v jízdě.
Tyto „drobné“ vylepšení se ukázaly jako dobré. Při závodech jel skoro ukázkově, každé překážce se vyhnul a našel bez problémů každý kužel. I mezi cílovými kužely se mu podařilo pokaždé projet. Bylo toho dost málo, co by se mu dalo vytknout. Snad jen problém se zatáčením na asfaltě, kdy jeho velká hmotnost a dobrá přilnavost kol mu dělala trochu problém při hodně pomalé jízdě. Ale s tím toho moc neudělám. I tak výsledky hovoří za vše.
| TÝM | Body 1. kolo |
Body 2. kolo |
Body 1.+2. kolo |
Body 3. kolo |
Body celkem |
Celkové pořadí |
| RK Mar. Lázně | 555 | 555 | 1110 | 555 | 1665 | 1 |
| JedoBoti | 360 | 250 | 610 | 350 | 960 | 2 |
| Cogito | 100 | 250 | 350 | 200 | 550 | 3 |
| Robotika - Matty M03 | 40 | 30 | 70 | 250 | 320 | 4 |
| JECC Lois | 50 | 40 | 90 | 50 | 140 | 5 |
| R-team - Matty M01 | 20 | 30 | 50 | 80 | 130 | 6 |
| JECC | 38 | 20 | 58 | 25 | 83 | 7 |
| ND Team | 0 | 0 | 0 | 30 | 30 | 8 |
| THD - Heros | 0 | 30 | 30 | 0 | 30 | 8 |
| Technische Hochschule Deggendorf | 0 | 20 | 20 | 10 | 30 | 8 |
| SynthCat Robotics - Blažena | 0 | 0 | 0 | 0 | 0 | 9 |